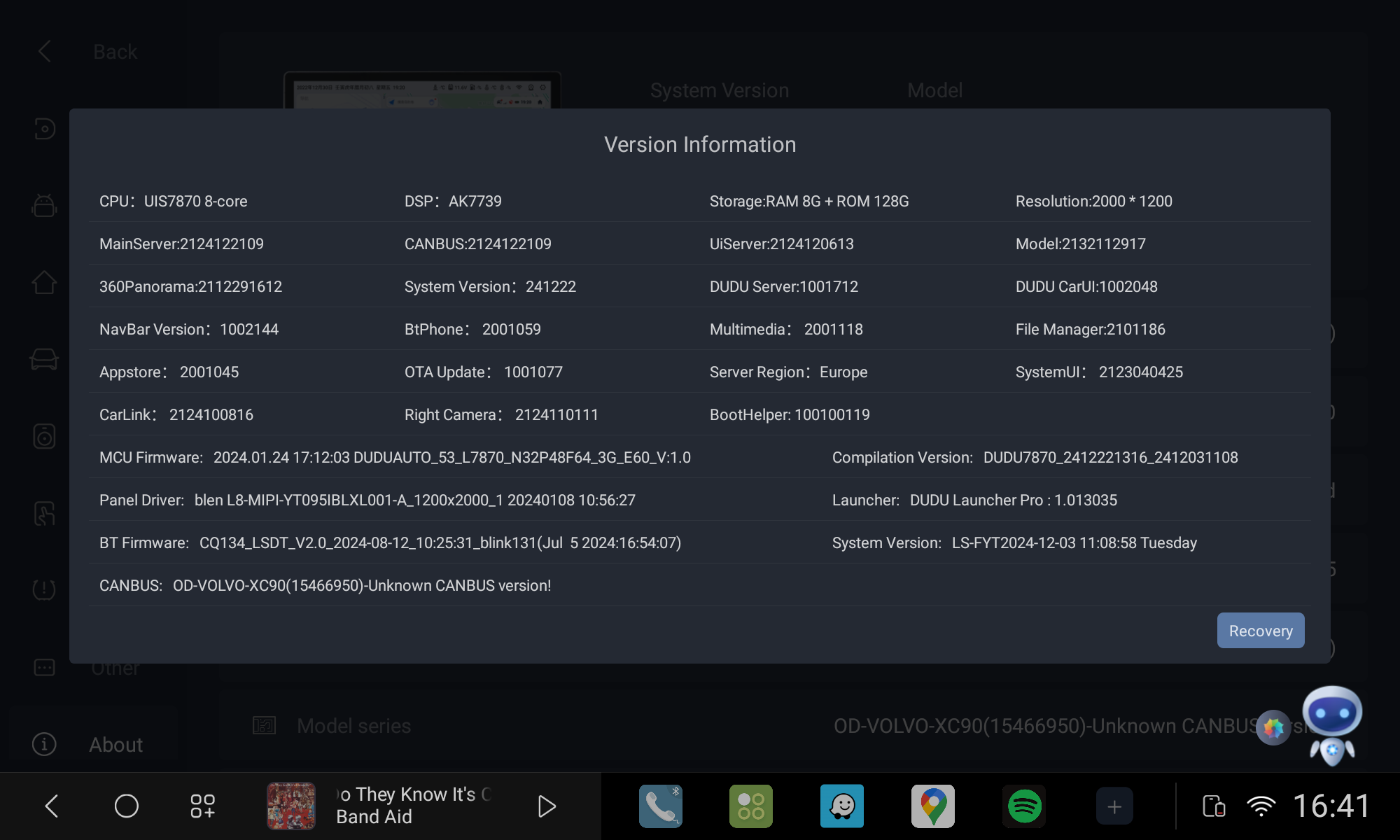
CAN-bus decoder: OD-OLO-02, HW: AV1, SW: V6, 241109:

Here is what I am running on my head unit:
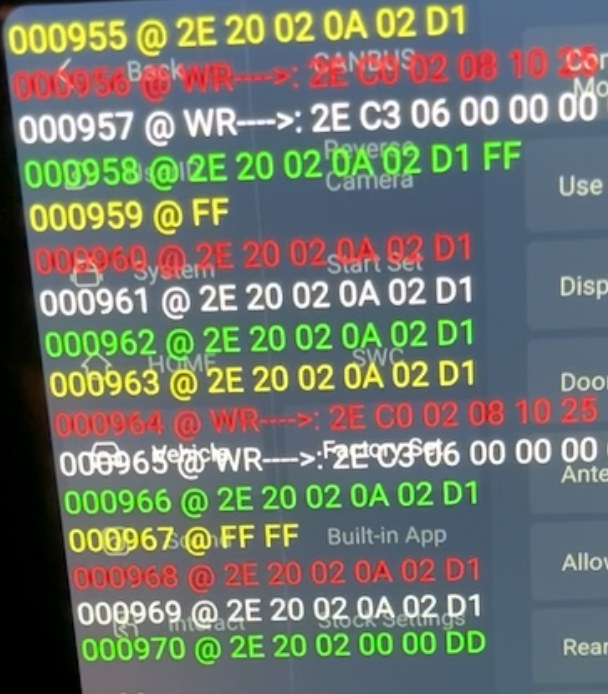
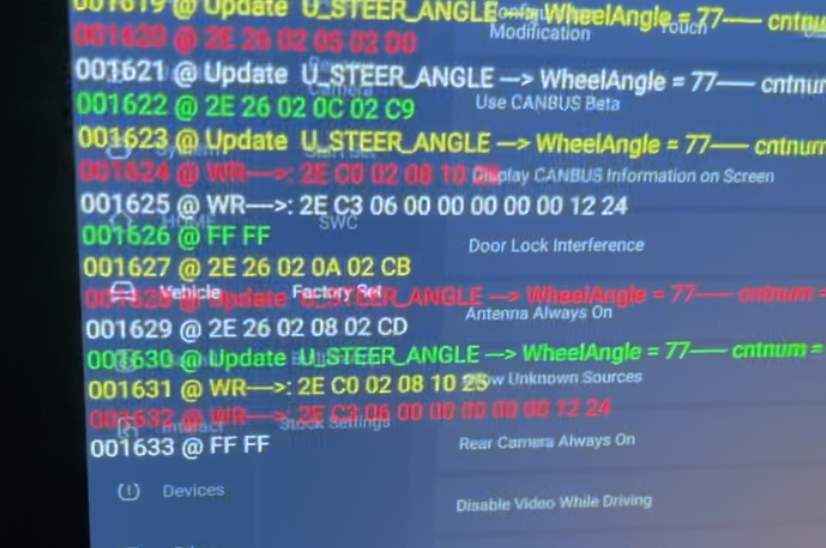
Below are recordings of the SWC buttons that produce a UART signal, but do not seem mapped to actions (this you can probably fix):
Hang up (Hex: 2E 20 02 0A 02 D1):
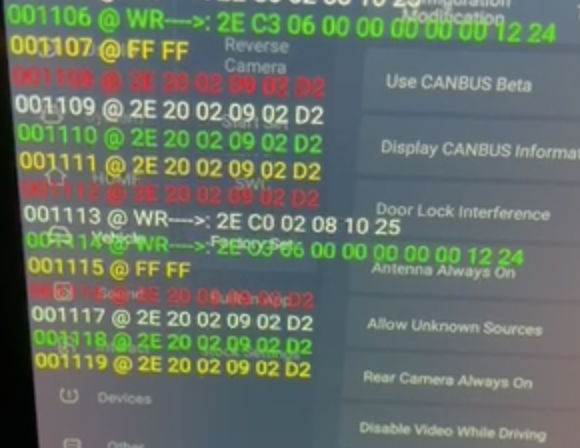
Pick up (Hex: 2E 20 02 09 02 D2):
Steering wheel angle is not correctly scaled (extreme angles hardly change the trajectory curvature). Extreme angles produce below:
Max right:
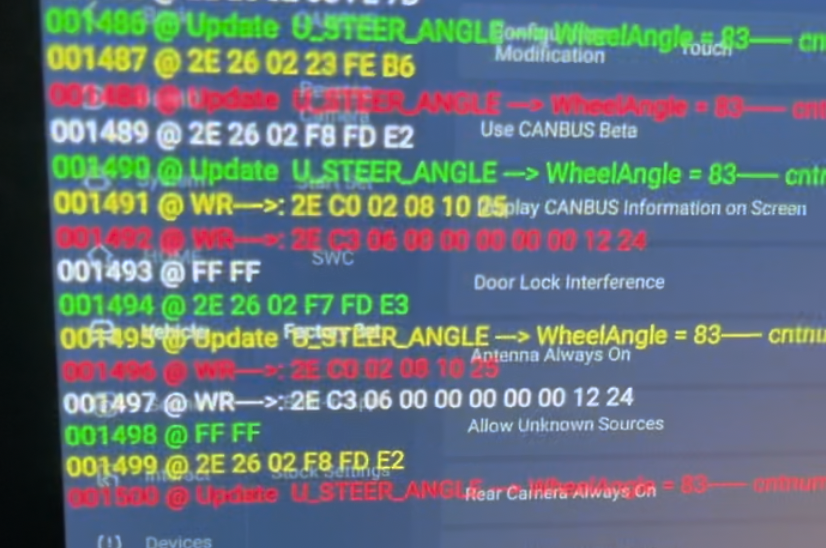
Max left:
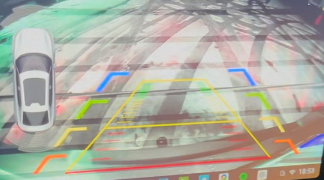
For reference, this is what the reverse trajectory lines look like with the wheels in extreme left (ignore the other overlay) - the trajectory lines are hardly affected.
SWC buttons enter, back, up, left, right, down do not produce any output from the CANbus decoder (No UART byte sequence appears). Parking sensor do not output any UART byte sequence either. I dont think you can fix this (requires firmware update of the CANbox), so please answer my original question:
1) Which CANbus decoder protocol (Eg Raise/VW/MPQ, HiWorld/Volvo/XC90 etc) is currently best supported in DUDUAUTO (has the most UART byte sequences mapped to car state signals?).
2) Could you share the target UART byte sequences to car state / keys for that protocol so I can implement the CAN signal > UART byte signal mapping in my firmware? I am primarily interested in hang-up call, pick-up call, back, enter, up, down, left, right, and rear parking sensor distances.