After several attempts, (Replaced TP sensors, after that simulated a faulty sensor ) I figured out what the problem was:
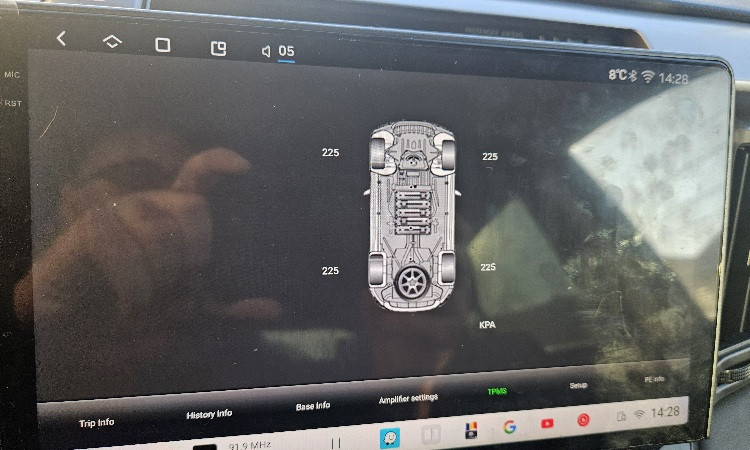
Issue nr.1 : If the system does not see all the pressure sensors (one is defective), it does not signal that one is defective and it does not display any values for the other good sensors.
Issue nr.2 : if the pressure in the wheel drops below the minimum set value, it does not warn anything.
Issue nr.3 : The vehicle information screen changes after a few moments from "vehicle status", "jumps" back in main "vehicle info" screen without touching anything.
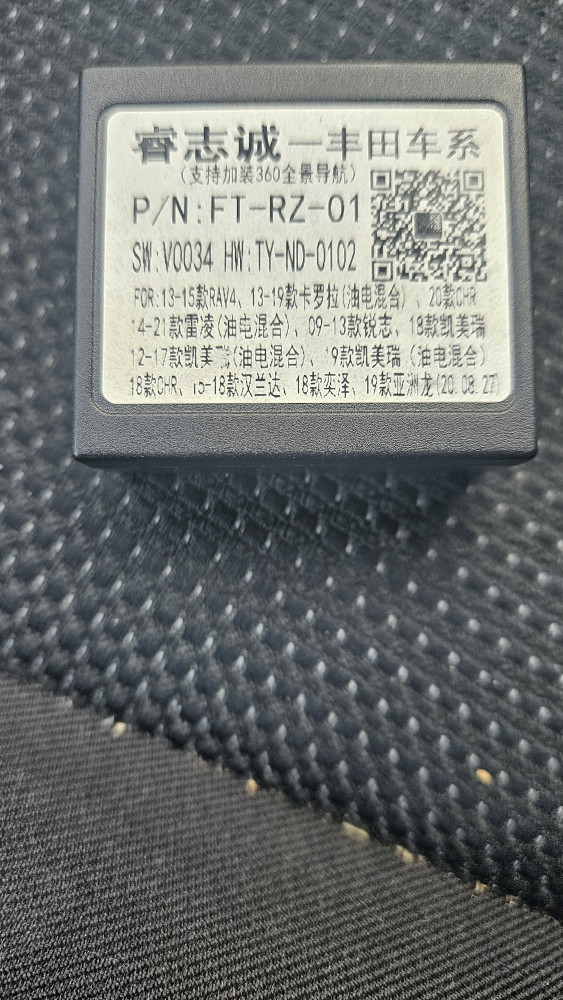
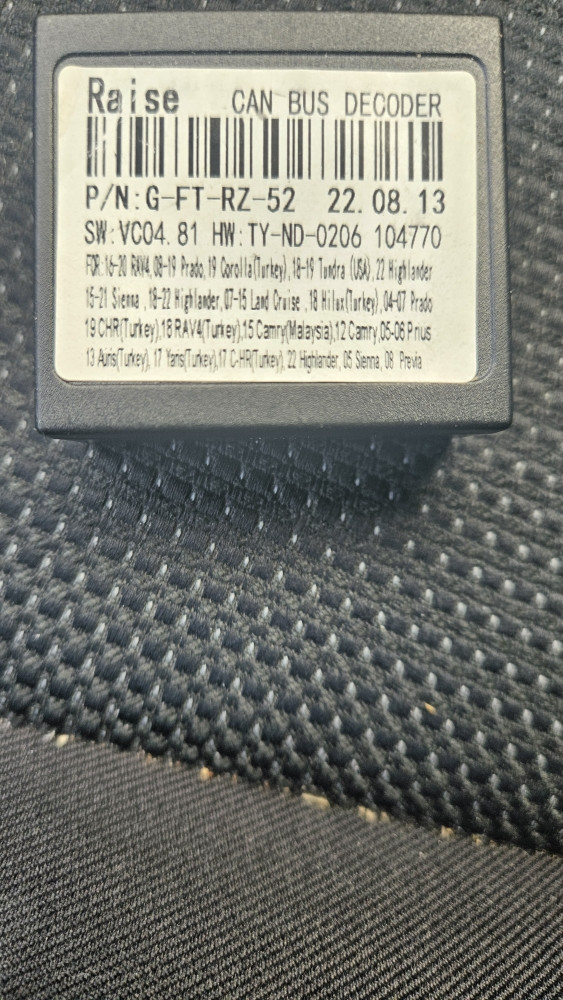
So it's not a canbus integration error, it is an error in OS programming.
May help this post for future udates...